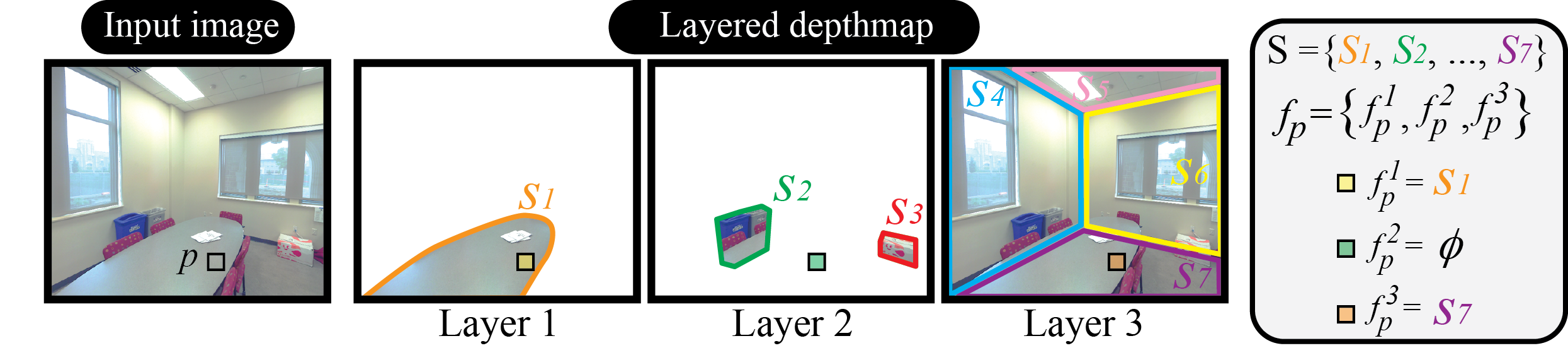
Figure 1: Our Occlusion-CRF model decompose a scene into layers of segmented depthmaps.
Abstract
This paper addresses the challenging problem of perceiving the hidden or occluded geometry of the scene depicted in any given RGBD image. Unlike other image labeling problems such as image segmentation where each pixel needs to be assigned a single label, layered decomposition requires us to assign multiple labels to pixels. We propose a novel "Occlusion-CRF" model that allows for the integration of sophisticated priors to regularize the solution space and enables the automatic inference of the layer decomposition. We use a generalization of the Fusion Move algorithm to perform Maximum a Posterior (MAP) inference on the model that can handle the large label sets needed to represent multiple surface assignments to each pixel. We have evaluated the proposed model and the inference algorithm on many RGBD images of cluttered indoor scenes. Our experiments show that not only is our model able to explain occlusions but it also enables automatic inpainting of occluded/invisible surfaces.